在现代化智能仓储领域,高效、精准的货物管理与自动化搬运是提升运营效率的关键。本文探讨如何将基于SpringBoot的仓库货物管理系统与基于Python视觉的爬柜式机器人叉车信息系统进行集成设计,并阐述其运行维护服务(对应代码35po5)的整体框架与实践要点。
一、系统架构设计
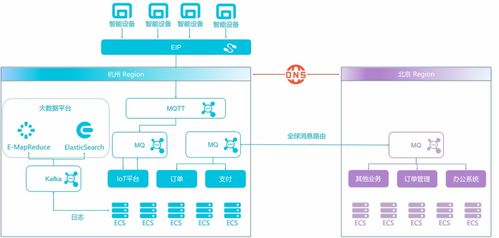
整个系统采用分层架构,分为数据层、服务层与应用层。
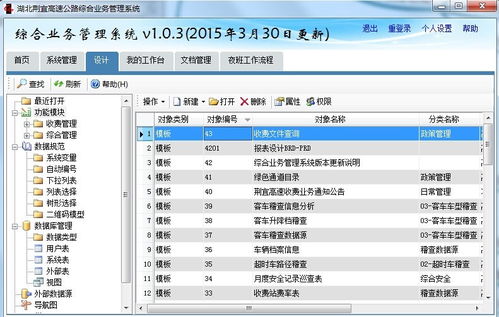
- 数据层:由SpringBoot构建的后台管理系统负责核心数据存储,包括货物信息、仓库布局、库存状态、订单记录等,使用MySQL或PostgreSQL数据库,并通过RESTful API提供数据接口。
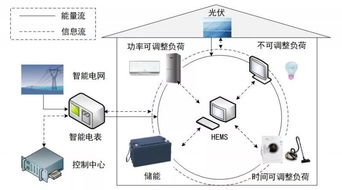
- 服务层:Python视觉系统作为独立服务运行,通过摄像头与传感器实现爬柜式机器人叉车的环境感知、货架识别、路径规划与自主导航。利用OpenCV、TensorFlow等库进行图像处理与机器学习,实时分析货柜位置与货物状态,并将操作数据(如取货/放货记录、位置坐标)通过HTTP/WebSocket协议发送至SpringBoot后端。
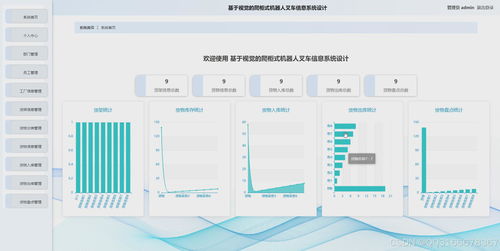
- 应用层:SpringBoot系统提供Web管理界面,展示仓库三维地图、机器人实时状态、货物追踪报表;Python系统可配备本地监控界面,用于调试与实时视觉反馈。
二、功能模块集成
- 仓库管理模块(SpringBoot):定义货区、货架、储位信息,与Python系统共享坐标映射,确保机器人精准定位。
- 视觉导航模块(Python):机器人通过视觉识别货架标签或二维码,结合SLAM技术构建动态地图,并将位置数据同步至SpringBoot系统,实现虚实映射。
- 任务调度模块:SpringBoot接收用户指令(如入库/出库),生成任务队列,通过消息队列(如RabbitMQ)向Python系统发送控制命令;机器人执行任务后,反馈结果以更新库存状态。
- 监控与报警模块:集成日志系统(如ELK栈),监控SpringBoot服务与Python视觉进程的运行状态;设定阈值报警(如机器人电量低、视觉识别失败),通过邮件或短信通知运维人员。
三、信息系统运行维护服务(35po5)
为确保系统长期稳定运行,需建立全面的运维体系:
- 日常监控:使用Prometheus监控服务器资源、API响应时间、机器人活动频率;通过Grafana可视化仪表盘实时展示系统健康度。
- 定期维护:每周备份数据库与配置信息;每月校准机器人视觉传感器,更新地图数据;每季度进行系统压力测试与安全漏洞扫描。
- 故障处理:设立快速响应机制,针对常见问题(如网络中断、视觉识别偏差)制定应急预案;利用SpringBoot的Actuator端点与Python日志分析工具(如Loguru)进行故障诊断。
- 迭代升级:根据业务需求,持续优化SpringBoot的数据处理逻辑与Python的视觉算法;采用Docker容器化部署,实现无缝更新与版本回滚。
四、技术挑战与优化方向
- 网络延迟:在分布式系统中,需优化通信协议,采用UDP传输实时机器人数据,确保控制指令的即时性。
- 视觉精度:通过深度学习模型持续训练,提升复杂光照环境下货架识别的准确率;结合红外传感器辅助定位,减少误差。
- 系统安全:在SpringBoot API层添加JWT认证,对Python系统的控制接口进行加密,防止未授权访问。
结论:通过SpringBoot与Python的协同设计,本系统实现了仓储管理的智能化与自动化。高效的运维服务(35po5)保障了系统可靠性,为未来扩展(如多机器人协同、AI预测补货)奠定了坚实基础。在物流行业数字化浪潮中,此类集成方案将显著提升仓库运营效率,降低人力成本。